
助力世界最长在建海底公路隧道项目,手持激光雷达灵光L2保驾护航
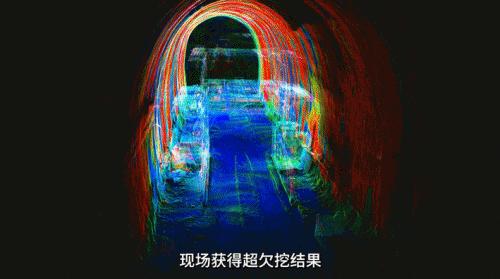
日前,其域创新合作伙伴百隧云,联合西南交通大学、中铁科研院西南院,采用灵光L2手持扫描设备,在青岛胶州湾第二海底隧道项目中,快速精准采集掌子面点云数据,现场即可测得超欠挖结果,高质量完成隧道测量工作,为项目建设有序推进保驾护航。
青岛胶州湾第二隧道建成通车后,将成为世界上最长的海底公路隧道,引领世界超长跨海通道建设发展的未来。
历经考验海底1万米的超级工程青岛胶州湾第二海底隧道,主线全长17.48千米,其中隧道长14.37千米(海域段9.95千米),是世界海底隧道建设规模最大,海底公路隧道长度最长,隧道领域施工复杂程度最高的超级工程。


根据胶州湾海域地质条件不同,项目分别从胶州湾东西两岸向胶州湾掘进,并在海底精准对接,对于施工精度和进度都有着非常严苛的要求。

中铁二局承建的标段位于黄岛一侧,由于花岗岩质地坚硬,只能采用钻爆法进行施工,需要经历爆破、“毛洞”到“精装”的阶段。在此过程中,既需要满足采掘数据获取的及时性要求,更需要满足项目工程对精度的要求。
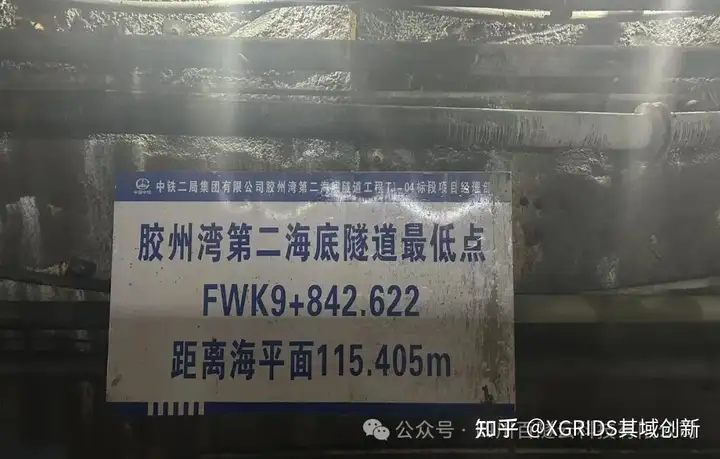
目前,胶州湾二隧施工进度已达到海平面下115.405米处,成为目前国内海底隧道施工所达到的最深位置,创中国水下隧道施工最深纪录。
这也是灵光Lixel手持产品目前最深的工作深度。
- 灵光L2,精度与效率之选 -由于水深极深,隧道面临的水压达到了1.1兆帕,相当于每平方米要承受40辆小汽车的重量。
为此,施工过程中需要浇筑一道由防水层和两层钢筋混凝土组成的屏障,单是装“天花板”这一工序,就需要十几名工人,将118根长27米直径2.8厘米的钢筋,整齐地绑扎成拱形严丝合缝地“镶嵌”在隧道内。

由于施工难度较大、采掘环境复杂、施工进度紧凑,传统的全站仪、断面仪或架站式激光扫描仪需要频繁的换站、复杂的操作及繁琐的内业,影响了测绘数据的及时性,难以满足隧道施工的效率要求。
灵光L2采用手持测量方式,结合首创的机身实时建模功能,可以帮助作业人员可在采集同时快速建立隧道高精度三维模型,可以保证20mm内的数据精度,精准采集掌子面点云数据和超欠挖情况,为隧道施工提供真实底图。

合作伙伴认为,使用灵光Lixel L2进行隧道测量有三大优势:
1、更高的作业效率和更轻松的作业方式。手持移动测量,即可生成1-2cm精度3D模型;
2、更快速的成果输出。点云无需后处理,数据成果快速回收,便于规划下一步工作;
3、更少的人力物力投入。单人即可作业,提高测绘效率,降低内外业成本。
其域创新将继续与合作伙伴一起,为更多超级工程提供三维测量与数字化的全新解决方案。
*手持SLAM、移动激光扫描系统主要由激光扫描仪、惯性导航系统及相机组成,用于测量点的三维坐标和激光反射强度,相机用于测量点的三维坐标和颜色信息。根据移动激光扫描系统和数码相机采集的数据可以得到点云数据,包括三维坐标、激光反射强度、颜色信息。
Simultaneous Localization And Mapping,简称SLAM,通过对各种传感器数据进行采集和计算,生成对其自身位置姿态的定位和场景地图信息的系统。目前SLAM主要的两种形式是:基于激光雷达的SLAM(激光SLAM)和基于视觉的SLAM(Visual SLAM或VSLAM)。
手持激光雷达、手持SLAM设备的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到周围障碍物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像。激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常,激光SLAM系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了自身的定位。激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时,点云信息本身包含直接的几何关系,使测量和计算变得直观简单。